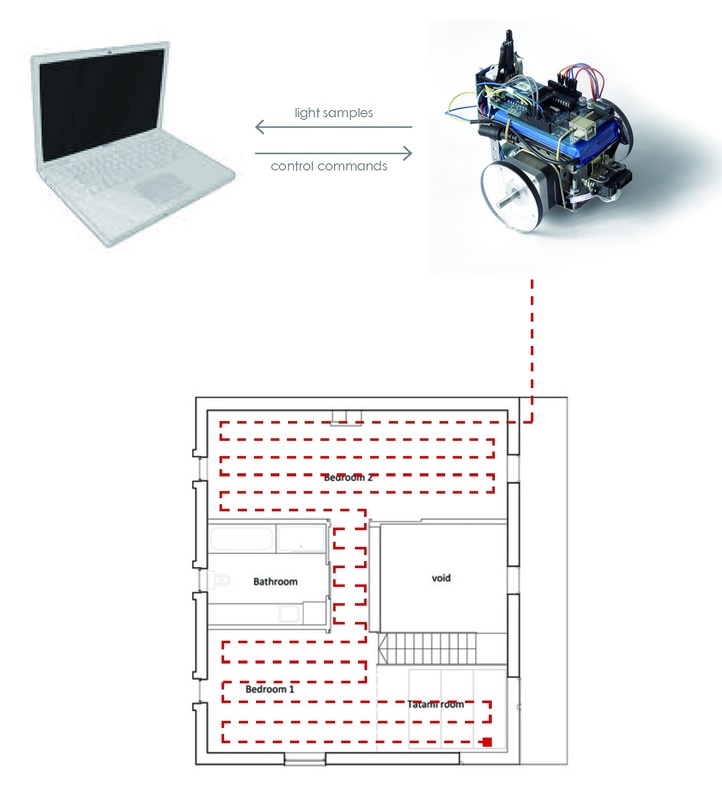
In this project, I was going to make a scanning robot which could scan the light intensity indoor and send the information wirelessly back to the computer end.
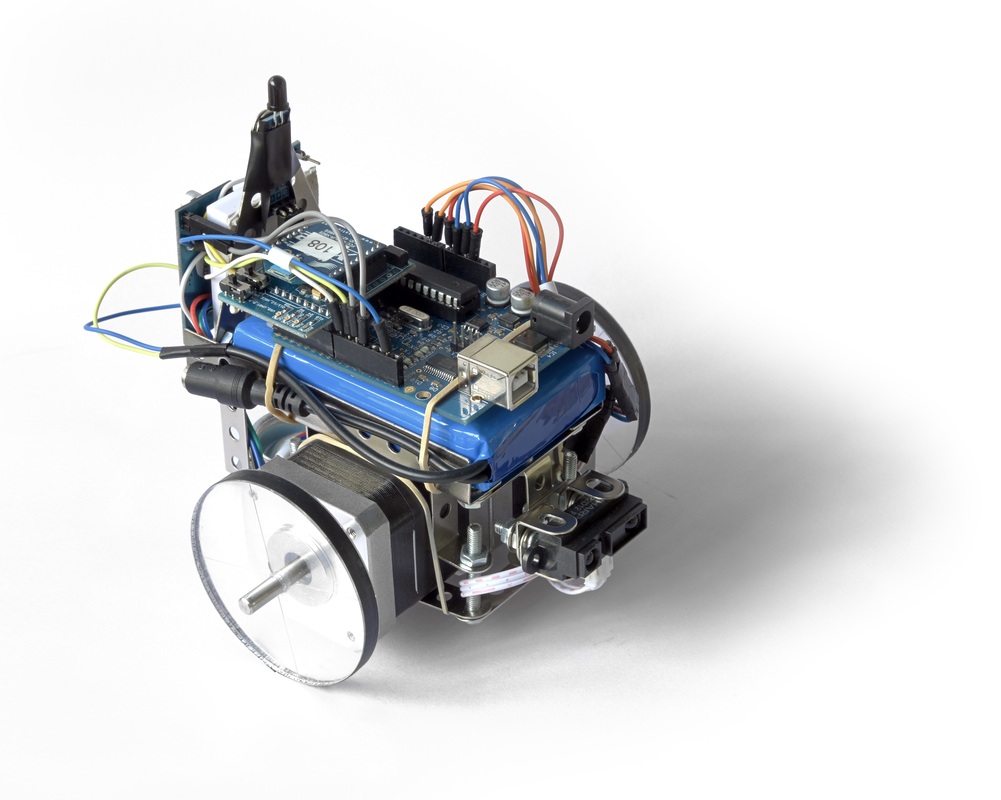
The robot can move and scan the room line by line automatically. It consists of one arduino board, a pair of stepper motors and step motor driver boards, one infrared sensor, one 12V battery, two xbee modulers and one light sensor.The infrared sensor in the front of the robot can detect blocks on the path. When encountering any block, the robot will turn to the next line . The stepper motors enable the robot to calculate the moving distance and make precise 90 degree turning. The robot can both send light information to the computer end and receive commands via Xbee communication.
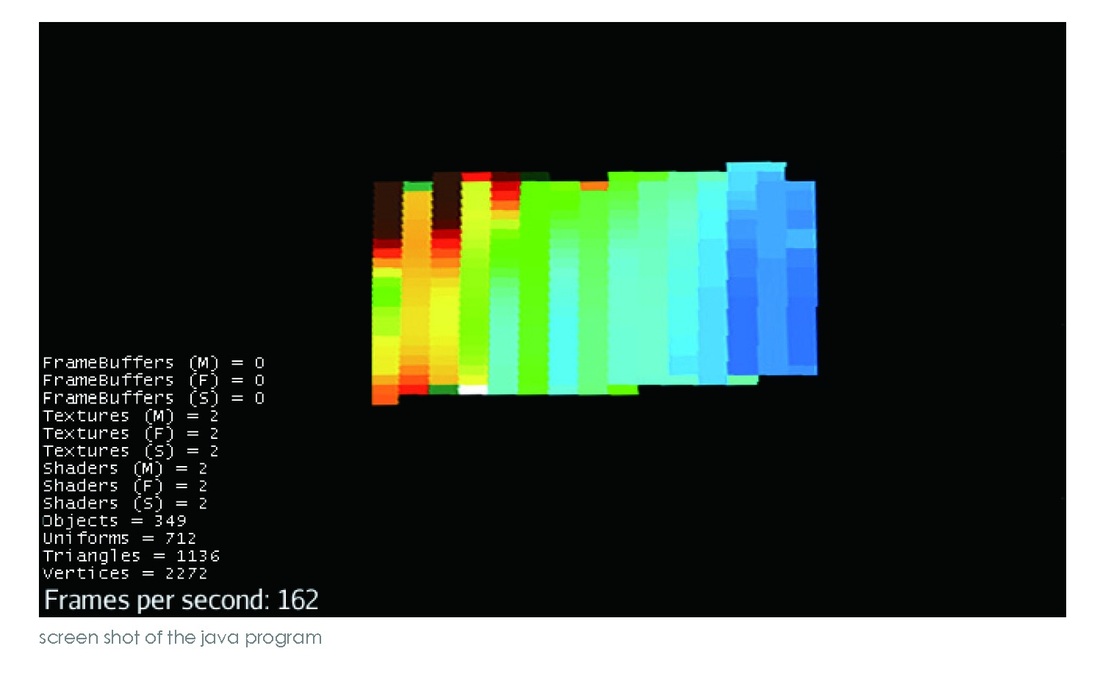
Once the progam on the computer end receives the data of the light, it will visulize these information with little rectangles in different colors which represent the intensities of the lights on different points.
 RSS Feed
RSS Feed